房间(用格栅表示)中有一个扫地机器人。格栅中的每一个格子有空和障碍物两种可能。
扫地机器人提供 4 个 API,可以向前进,向左转或者向右转。每次转弯 90 度。
当扫地机器人试图进入障碍物格子时,它的碰撞传感器会探测出障碍物,使它停留在原地。
请利用提供的 4 个 API 编写让机器人清理整个房间的算法。
interface Robot {
// 若下一个方格为空,则返回true,并移动至该方格
// 若下一个方格为障碍物,则返回false,并停留在原地
boolean move();
// 在调用turnLeft/turnRight后机器人会停留在原位置
// 每次转弯90度
void turnLeft();
void turnRight();
// 清理所在方格
void clean();
}
示例:
输入:
room = [
[1,1,1,1,1,0,1,1],
[1,1,1,1,1,0,1,1],
[1,0,1,1,1,1,1,1],
[0,0,0,1,0,0,0,0],
[1,1,1,1,1,1,1,1]
],
row = 1,
col = 3
解析:
房间格栅用0或1填充。0表示障碍物,1表示可以通过。
机器人从row=1,col=3的初始位置出发。在左上角的一行以下,三列以右。
注意:
- 输入只用于初始化房间和机器人的位置。你需要“盲解”这个问题。换而言之,你必须在对房间和机器人位置一无所知的情况下,只使用 4 个给出的 API 解决问题。
- 扫地机器人的初始位置一定是空地。
- 扫地机器人的初始方向向上。
- 所有可抵达的格子都是相连的,亦即所有标记为 1 的格子机器人都可以抵达。
- 可以假定格栅的四周都被墙包围。
题解
我们可以使用深度优先搜索来模拟机器人的扫地过程,即顺着当前机器人的朝向一直清扫下去,如果遇到障碍(清扫过的格子也算障碍),那么向右转向,直到找到一个没有障碍的朝向(继续进行搜索)或所有的朝向都有障碍(回溯)。
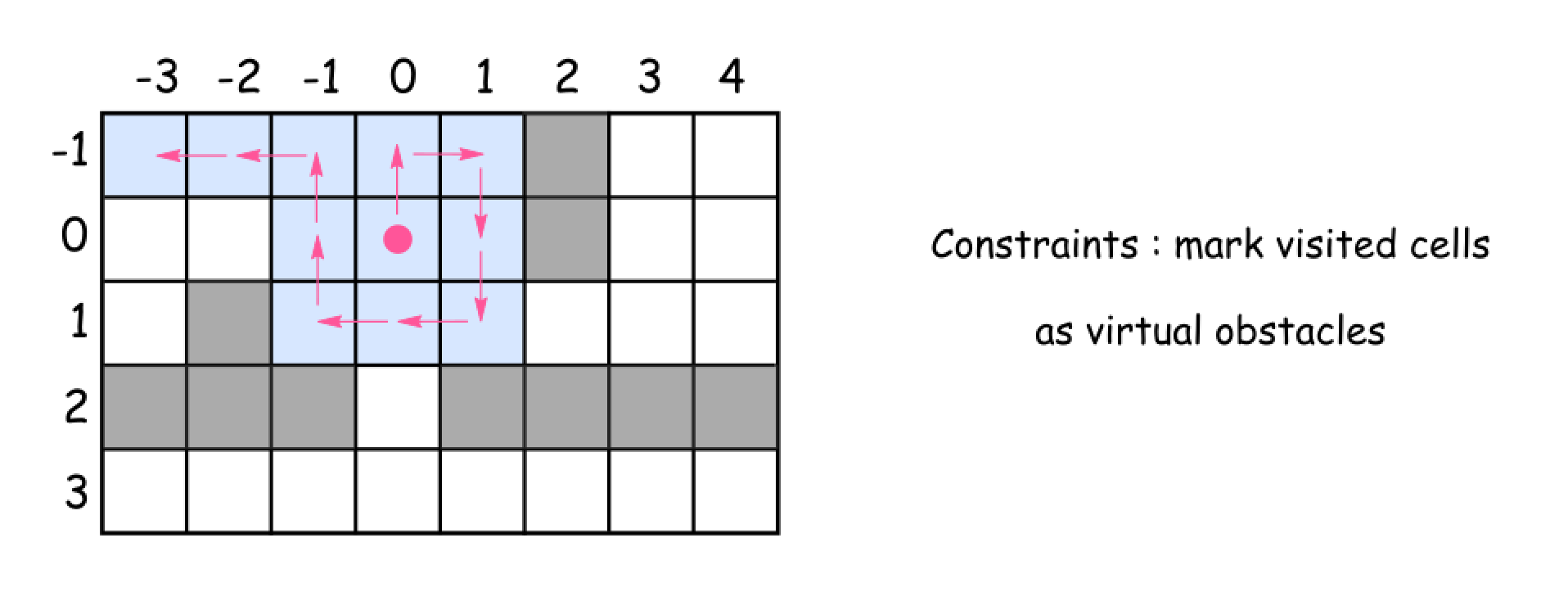
下图给出了机器人的扫地过程中某一步的状态,在此过程中,所有清扫过的格子都被视作障碍,不会重复经过。
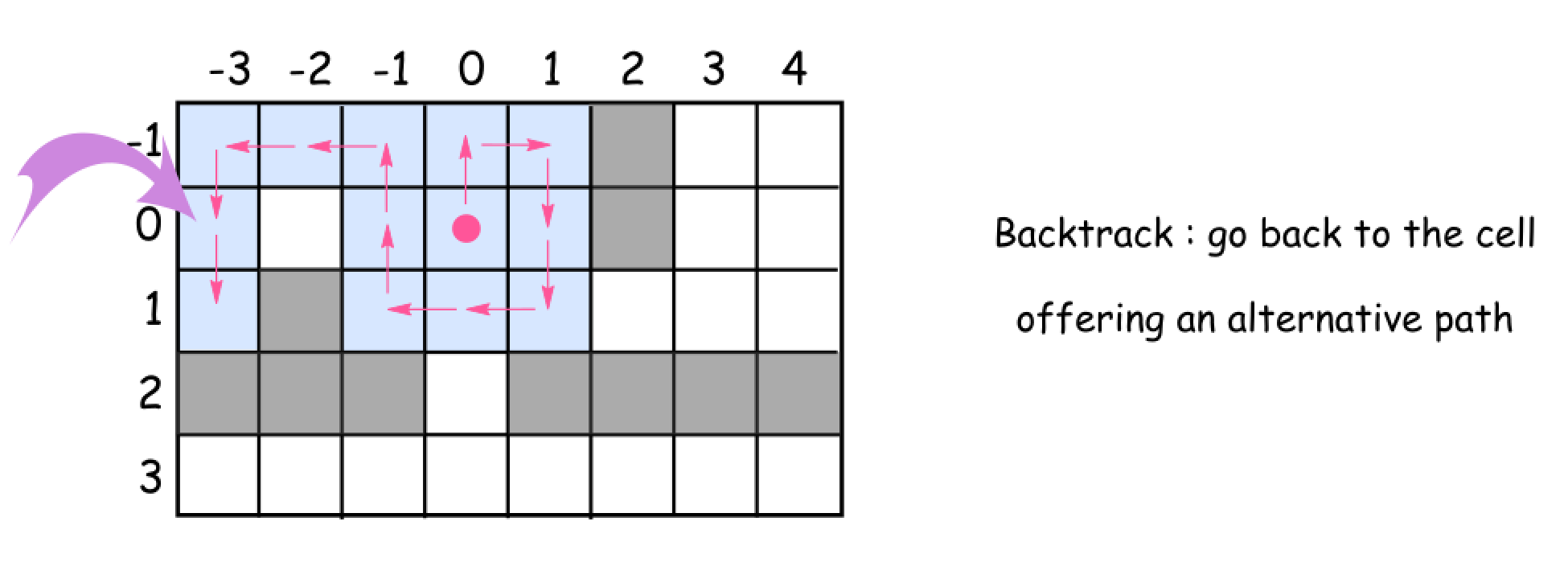
下图给出了机器人的回溯过程,在到达 (1, -3) 后,由于四个方向都是障碍,因此只能进行回溯,推到 (0, -3)。
下面给出了整个算法的框架:
我们从起始位置开始,记录当前的位置为
cell = (0, 0),以及机器人的朝向direction = 0;将起始位置进行清扫,并进行标记(即清扫过的格子也算作障碍);
依次选择四个朝向
up,right,down和left进行深度优先搜索,相邻的两个朝向仅差一次向右旋转的操作;对于选择的朝向,检查下一个格子是否有障碍,如果没有,则向对应朝向移动一格,并开始新的搜索;
如果有,则向右旋转。
如果四个朝向都搜索完毕,则回溯到上一次搜索。
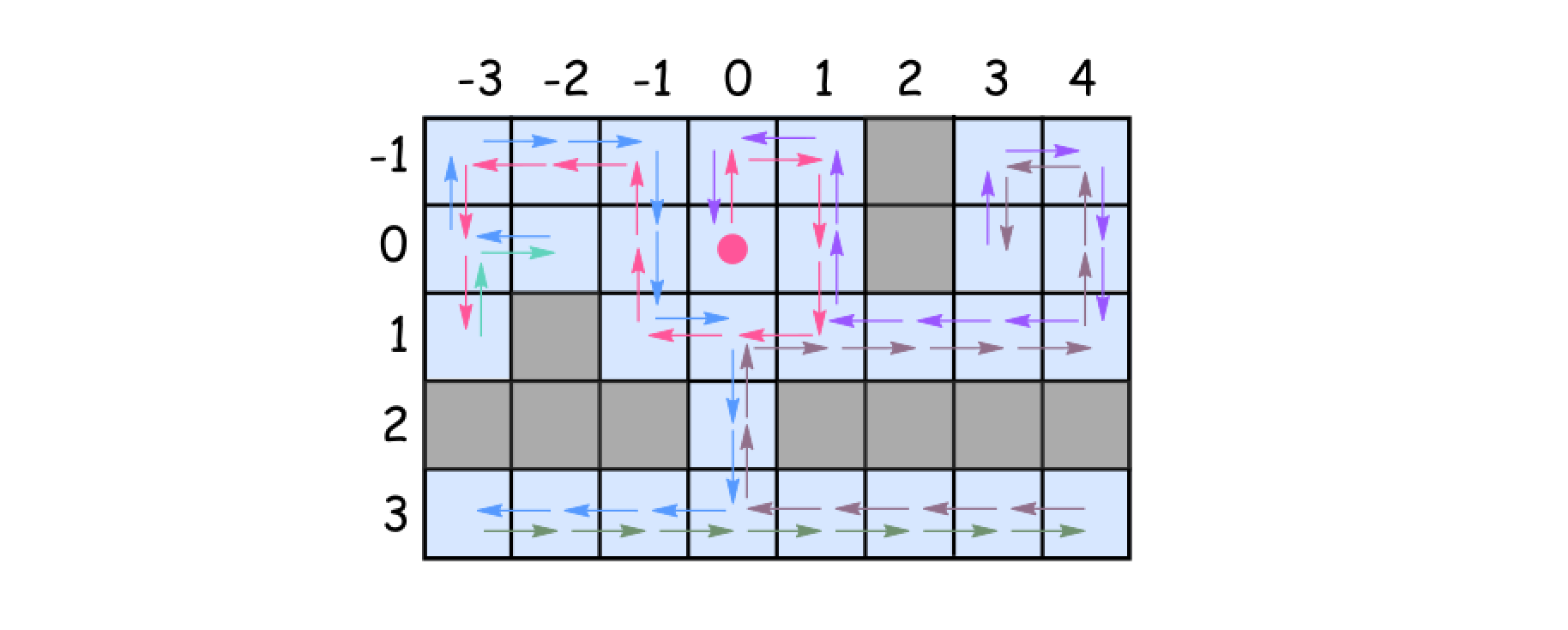
下图给出了根据此算法,机器人移动的过程。
struct PairHash { // 自定义hash函数
size_t operator()(const pair<int, int>& key) const {
return hash<int>{}(key.first * 131) ^ hash<int>{}(key.second);
}
};
class Solution {
int dirs[4][2] = {-1, 0, 0, 1, 1, 0, 0, -1};
unordered_set<pair<int, int>, PairHash> vis; // 防止重复访问
public:
void cleanRoom(Robot& robot) {
dfs(robot, 0, 0, 0);
}
void dfs(Robot& robot, int x, int y, int di) {
vis.emplace(x, y); // 标记为已访问
robot.clean();
for (int i = 0; i < 4; ++i) {
int nd = (i + di) % 4, nx = x + dirs[nd][0], ny = y + dirs[nd][1];
if (vis.count(make_pair(nx, ny)) == 0 && robot.move()) {
dfs(robot, nx, ny, nd);
// 回溯
robot.turnRight();
robot.turnRight();
robot.move(); // 移动过的一步,再移动回来
robot.turnRight();
robot.turnRight();
}
robot.turnRight();
}
}
};
复杂度分析
时间复杂度:\(O(4^{N - M})\),其中 \(N\) 是房间的大小,\(M\) 是障碍物的数量。
空间复杂度:\(O(N - M)\)。